
Last modified on November 10, 2023
AWARE2ALL defined the Use Cases for its Demonstrators
The AWARE2ALL EU project evaluates the safety challenges posed by the interaction between human driven vehicles and highly automated vehicle in future mixed traffic scenarios. The project will develop inclusive safety and HMI systems that consider the variety of population, including underrepresented groups such as women, elderly and people with physical disabilities or low digital abilities.
The project has identified the Use Cases (UCs) to be evaluated in its four Demonstrators that are planned to be tested during the third year of the project. These Use Cases are aligned with the diverse user groups perspectives and needs; they are based on the SSH approach adopted by AWARE2ALL, and have been validated in a recent workshop.
The 14 use cases defined are:
For Demonstrator 1 – Passive safety:
- Frontal Collision with Rear-Facing Occupancy
- Frontal Collision with Forward-Facing Occupancy
- Frontal Collision with opposed-facing Occupancy
- Frontal Collision out-of-stance occupancy
- Side impact
This demo will include the 3D simulation model of the new vehicle interior configuration with seats, belt systems and airbag systems for crash simulation.
For Demonstrator 2 – Active safety (without driver):
- Frontal Collision out-of-stance occupancy
- Side impact
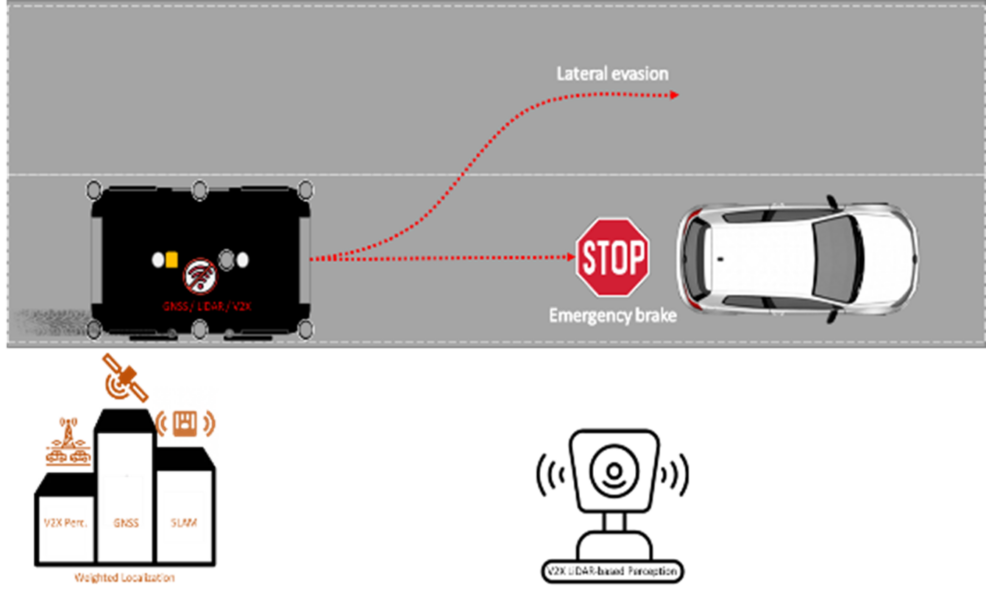
This demo will showcase an automated L4 shuttle deploying strategies for fall back and emergency situations on system components/ sensors failure including fail-operational functionalities, such as Adaptive Emergency Braking, evasive manoeuvring, or safe/ comfortable stops.
For Demonstrator 3 – Active safety (with driver):
- Transition of control
- Autonomous emergency manoeuvre without driver intervention
- Occupants’ monitoring
- Driver-HAV interaction

This hybrid demonstrator is linked to a driving simulator which includes environment visualization based on OpenStreet Map and vehicle dynamics simulation including active safety features that will be based on a new trajectory optimization architecture creating a risk field based on object motion prediction, crash severity prediction and ego-motion prediction using a reference path from the navigation function.
For Demonstrator 4 – eHMI:
- eHMI for Vulnerable road user (VRU) safety in parking manoeuvres
- eHMI for VRU safety in zebra crossing
- VRU pick-up
A vehicle on-board external perception system will be implemented, consisting of cameras, while additional sensors, such as LiDAR or GPS may be used for validation. Multimodal communication system will be also implemented.

An updated version of the use cases will be released by the end of the year, including more details on the key characteristics and scenarios of the different demonstrators of AWARE2ALL, the ecosystem to be involved, the vehicle, traffic and weather conditions, as well as the software and hardware components.
Source: The original article was published here