2025 Gaps and Recommendations
Introduction
In the last years, a big effort has been dedicated by many companies, associations, research institutes and universities in standardisation of Connected and Automated Driving (CAD) technologies.
This article aims to collect and investigate the main gaps in CAD standardization. The process of collection has been performed by searching for public technical reports, and by discussing with several experts working in academia, in the automotive industry, in research institutes, and in standardisation bodies. Indeed, this is a hard task because the topic of connected and automated driving is wide and it requires a deep knowledge on different fields. This article attempts to summarize and harmonize all the gaps and recommendations related to CAD standards emerged from different source of information.
In order to help the readers, all recommendations are marked in bold throughout the text and summarised in the final sections.
Data analysis
Since 2015, the number of published standards per year increased exponentially (figure 1) demonstrating a an increasing needs for standardisation. Until March 2025, 341 standards in the field of connected and automated driving have been published, and 48 standards are still under development. An impressive number of standards have been published so far. However, there are still some gaps to be covered in the next years.
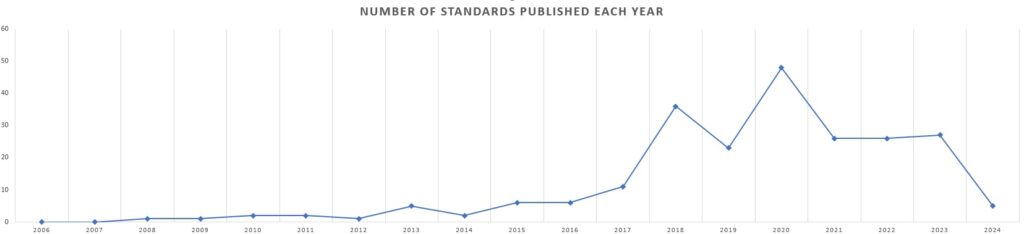
Figure 1: Number of standards per year related to connected and automated driving vehicles
On the web page Standards List, all the CAD standards are listed and categorized. They have been distinguished in two categories: under development and published. Furthermore, each standard has been assigned to the following domains:
- AD/ADAS functions
- Artificial Intelligence
- Big Data
- Connectivity
- Cybersecurity
- Ethics
- Fleet Operations
- Human Machine Interface
- Infrastructure
- In-Vehicle Systems, Networks, Data and Interface Definition
- Management/Engineering Standards
- Map and Positioning
- Privacy & Security
- Safety
- Terms & Definitions
- Testing, Verification & Validation
In the Figure 2 are graphed the number standards per each domain, divided into published and under development. To be able to see the evolution of the CCAM relevant standardisation since 2021 Figure 3 shows the situation in 2021. The number of standards and the standardisation domains have been increased considerably.
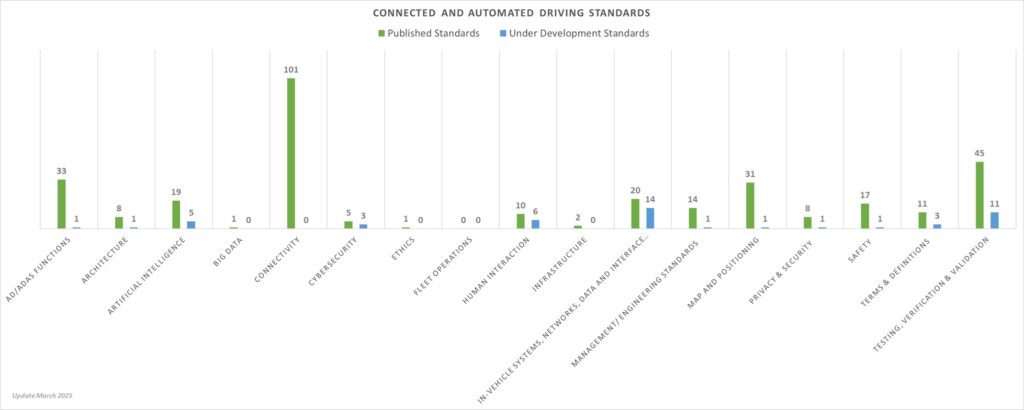
Figure 2: Connected and automated driving standards divided by domains by 2025
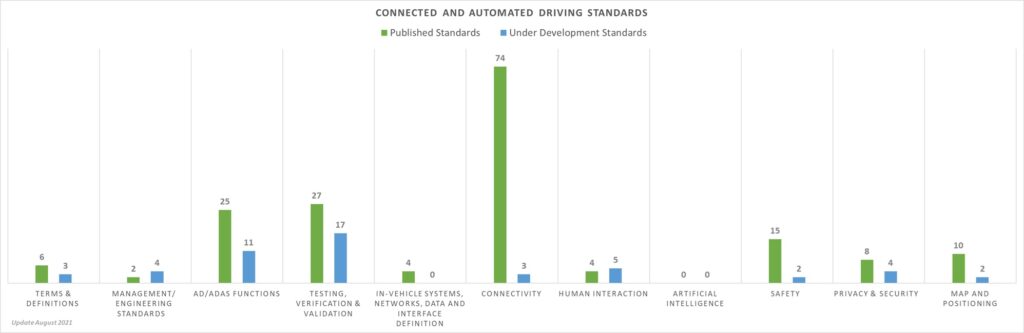
Figure 3: Connected and automated driving standards divided by domains by 2021
Standards for Artificial Intelligence
From a further investigation of AI standards, it emerged that the International Standard Organization (ISO) and International Electrotechnical Commission (IEC) decided in 2018 to create the subcommittee (SC42) dedicated to the topic of Artificial Intelligence. The subcommittee SC42 is part of the Joint Technical Committee “Information Technology” (JTC1). Over the past years, SC42 has expanded its scope to address emerging AI challenges, including ethical considerations, sustainability, and domain-specific applications such as mobility and healthcare:
- WG1: Foundation standards
- WG2: Data
- WG3: Trustworthiness
- WG4: Use cases and applications
- WG5: Computational approaches and computational characteristics of AI systems
- JWG2 with ISO/IEC JTC 1/SC 7: Testing of AI-based systems
- JWG3 with ISO/TC 215 WG: AI enabled health informatics
- JWG4 with IEC TC 65/SC 65A: Functional safety and AI systems
- JWG5 with ISO/TC 37: Natural language processing
All the standards in preparation by these working groups are not specifically developed for connected and autonomous driving field, but they take into account a wide range of applications.
In the automotive industry the standardization activities related to functional safety (ISO 26262) and SOTIF (Safety of the Intended Functionality, ISO 21448) have started to consider the problem of introduction of artificial intelligence algorithms in the ADAS and automated driving systems.
Nevertheless, the work accomplished inside the WG3 could potentially help to improve the safety of connected and automated vehicles. In particular, the WG3, which is working on trustworthiness, has the following tasks [4]:
- Establish trust in AI trough transparency, verifiability , explicability and controllability.
- Investigate threats and risks of AI systems
- Investigate approaches to achieve AI systems robustness, resiliency, accuracy, safety, security privacy.
Firstly, the concept of transparency and explicability is extremely important in those software modules responsible for the decision and execution of the automated manoeuvres. In case of an accident due to an apparent wrong manoeuvre, the decision process followed by the autonomous driving system before the accident event must be completely transparent and explicable. The following relevant work items are under development and under publication as of June 2025:
ISO/IEC TS 6254 Information technology — Artificial intelligence — Objectives and approaches for explainability and interpretability of machine learning (ML) models and artificial intelligence (AI) systems
ISO/IEC FDIS 12792 Information technology — Artificial intelligence — Transparency taxonomy of AI systems
Secondly, the topic of threats and risks is essential to assess ethics and goodness of choices. In particular, considering the nature of some AI techniques, the goodness of choices needs to be assessed by using a statistical approach. Indeed, risks cannot be eliminate, but it could be reduced as much as possible. The remaining residual risk needs to be quantified to understand if could be socially and statistically accepted. The following work items are under development and was published since 2021:
ISO/IEC 23894:2023 Information technology — Artificial intelligence — Guidance on risk management
ISO/IEC AWI TS 25568 Information technology — Artificial Intelligence — Guidance on addressing risks in generative AI systems
Finally, the topic of robustness is very important for deploying AI models in CAD vehicles. The word “robustness” is used as a general terms for describing a series of properties of AI techniques [4] [5]. However, we can summarize the robustness as the property to maintain unchanged the performance with respect to small input variations. In detail, it is not required that the outputs remain exactly the same with respect to small input variations, but the overall performance has to remain unchanged. As an example, considering to have an artificial neural network able to recognize cars with a detection rate of 90%. The property of robustness could require that the detection rate remains unchanged regardless of time of day. Since 2021 ISO/IEC JTC 1 SC 42 has published the following new part of ISO/IEC 24029 series standards:
ISO/IEC 24029-2:2023 Artificial intelligence (AI) — Assessment of the robustness of neural networks — Part 2: Methodology for the use of formal methods (link)
Also a new work item was proposed as part 3 of the series an it is currently under development:
ISO/IEC AWI 24029-3 Artificial intelligence (AI) — Assessment of the robustness of neural networks — Part 3: Methodology for the use of statistical methods (link)
In order to verify the robustness and performance of AI models, formal methods cannot be used in practice, therefore statistical methods have to be implemented as shown above. On this regards, as suggested in [4], it is needed an international standard for field testing. Probably, this could vary significantly between industries and type of applications. Regardless of the industries, the field tests can increase the trustworthiness and the safety, or in general the credibility of this techniques. Moreover, this standard could help to define responsibilities of different stakeholders during design, implementation, verification and certification phases. ISO/TC 22 SC 32 has published a PAS in 2024 about the safety of artificial intelligence which discusses the verification and validation of an AI system in automotive ecosystem:
ISO/PAS 8800:2024 Road vehicles — Safety and artificial intelligence (link)
As mentioned before, all these aspects are crucial for AI deployment in CAD vehicles. For this reason, the WG3 is proceeding in the right direction to provide solutions to these challenges and enable automotive industries to use safe AI technologies.
In 2021 the following liaison activity needs were identified between ISO/IEC JTC 1 SC 42 and the other technical committee (TC) :
- ISO/TC 204 Intelligent Transportation System
- ISO/TC 22 Road Vehicle
- IEEE P2846 Autonomous Vehicle Decision Making
In 2025 ISO/IEC JTC 1 SC 42 has the following relevant liaisons:
- ISO/TC 22 SC 32 Road vehicles/Electrical and electronic components and general system aspects
- ISO/TC 204 Intelligent transport systems
- ISO/TC 211 Geographic information/Geomatics
- IEEE Institute of Electrical and Electronics Engineers, Inc
- ITU International Telecommunication Union
Thanks to this several AI focusing working groups were created eg. ISO/TC 22 SC 32 WG 14 “Safety and Artificial Intelligence” and ISO/TC 204 WG 20 Big Data and Artificial Intelligence supporting ITS. Important work items were initiated:
ISO/PWI 25026 Methods and metrics for evaluating road vehicle AI safety
ISO/AWI TS 22577 Intelligent transport systems — Nomadic and mobile devices — In-vehicle passenger monitoring and care services using deep learning technology
ISO/CD TR 12786.2 Intelligent transport systems — Big data and artificial intelligence supporting intelligent transport systems — Use cases
While significant progress has been made since 2021 through ISO/IEC JTC 1 SC 42 and its liaisons with automotive and ITS committees, notable gaps remain for the deployment of AI in Connected, Cooperative, and Automated Mobility (CCAM). Existing AI standards primarily address general principles such as trustworthiness, risk management, transparency, and robustness, but they lack domain-specific guidance tailored to the operational, safety, and regulatory demands of CCAM systems. Critical areas still underdeveloped include standardized methods for AI-based decision traceability in driving scenarios, field validation and verification protocols, and clear metrics for AI performance under real-world uncertainties. Additionally, there is a need for better integration between AI risk assessment frameworks and functional safety standards (eg. ISO 26262 series and ISO 21448). Until these gaps are addressed through targeted, interoperable standards and cross-domain coordination, the large-scale, safe deployment of AI-driven automated vehicles will remain constrained by uncertainty and regulatory fragmentation.
Standard recommendations in 2021-2025
The scope of this article is to give to readers a series of recommendations on CAD standardisation . However, it is important to mention that the authors of this article are not the only ones trying to analyse the standards published so far and to highlight the main gaps. Four organisations worked on the same topic in the last years. They published the following five documents:
- ISO/TR 20545:2017 “Intelligent transport systems — Vehicle/roadway warning and control systems — Report on standardisation for vehicle automated driving systems (RoVAS)/Beyond driver assistance systems”, July 2017
- IEEE P2020 – Automotive Imaging White Paper, 2018
- “Standardisation Roadmap for Automated Driving”, Verband der Automobilindustrie (VDA), May 2019
- “Connected and Automated Vehicle Technologies – Insights for Codes and Standards in Canada”, Canadian Standardization Association Group (CSA), June 2020
- ISO Report on standardisation prospective for automated driving (RoSPAV), January 2021
In particular, the last three publications have been published recently, thus they can offer valuable information to understand the remaining gaps.
ISO/TR 20545:2017
This technical report published in 2017 offers some interesting recommendations, some of them have been already included in new standards. However, some others are still not considered so far. In this article the remaining standard gaps are emphasized.
The ISO/TR 20545:2017 advises to standardise functional requirements, functional architecture and interfaces between the different components. This standardisation will help the industry to be faster and it will increase the compatibility between different solutions in the market. While ISO 23150:2021 initiated this process by specifying the interface between perception sensors and data fusion software modules, the ongoing development of additional ISO 23150-series standards is now extending this effort. These forthcoming parts aim to comprehensively define the interfaces between various perception sensors and in-vehicle automated driving components, further supporting interoperability, modularity, and system integration across suppliers and OEMs. The following standards are published or are very close to publication:
ISO 23150-1 Road vehicles – Logical interface between sensors and data fusion unit for automated driving functions – Part 1: General information and principles
ISO 23150-11 Road vehicles – Logical interface between sensors and data fusion unit for automated driving functions – Part 11: Radar detection interface
ISO 23150-12 Road vehicles – Logical interface between sensors and data fusion unit for automated driving functions – Part 12: Lidar detection interface
ISO 23150-13 Road vehicles – Logical interface between sensors and data fusion unit for automated driving functions – Part 13: Camera detection and feature interfaces
ISO 23150-14 Road vehicles – Logical interface between sensors and data fusion unit for automated driving functions – Part 14: Ultrasonic detection and feature interfaces
ISO 23150-15 Road vehicles – Logical interface between sensors and data fusion unit for automated driving functions – Part 15: Microphone detection interface
ISO 23150-20 Road vehicles – Logical interface between sensors and data fusion unit for automated driving functions – Part 20: Supportive and sensor input interface
Furthermore, the ISO technical report recommends the standardisation of requirements of some particular safety critical modules:
- Requirements between the driver and system at each level of automation and during the control transition
- Requirements of system operations in case of a system malfunction.
- Requirements for reliability and certifications.
IEEE P2020
The IEEE P2020 Working Group was created in 2016 during the AutoSense Conference in Brussels [9]. This group aims at defining a common approach in the automotive industry to measure image quality. The working group is aware that vehicle manufacturers, tier 1 and tier 2 lack of a common language for describing the quality of images. This ambiguity has created tensions between stakeholders during project executions and it has raised the project costs.
The IEEE P2020 Working Group has developed the IEEE 2020–2024 standard. It was published in March 2025, which marks a significant advancement in defining image quality benchmarks and integration frameworks for Connected and Automated Mobility (CCAM) systems. Some of the fundamental attributes that contribute to image quality for automotive applications are addressed in this standard. Existing metrics and other information relating to these attributes are also identified, as well as a standardized suite of objective test methods for measuring automotive camera image quality. In addition, baseline test methods and relevant information about tools available to facilitate standards-based communication, as well as a comparison of performance among vehicle manufacturers, system integrators, and component vendors regarding automotive image quality, are outlined.
More detailed information related to the automotive image quality gaps could be found in [9].
The published standard is available in [10].
VDA recommendations
The technical report on standardisation roadmap by VDA has been published in May 2019. Since then, a lot of standards have been published or are under development. After reviewing the contents of the VDA report [2], there are some important domains, which still requiring a standardisation. The recommendations have been summarized and categorized into domains:
| Domain | Recommendations by VDA |
|---|---|
| Management/ Engineering Standards | Inspection requirements for operators managing autonomous vehicle fleet. The suitability of this operator has to be confirmed in the future by certifications. Requirement of operational management of automated vehicle fleet during the phase of parking, service, refuelling, access authorization and fault management. |
| Safety | Ethical requirements on the actions to undertake in case of an emergency situations. A social recognized model to compare the performance of “safe automated driving functions” with respect a human driving performance. This is very useful for CAD acceptance and introduction |
| AD/ADAS functions | Recognition of emergency vehicles belongs to police, firefighter, ambulances, etc. |
CSA Group recommendations
The CSA published an interesting report in June 2020 [3] based on a collaborative work of 14 stakeholders belonging to automotive industry (OEM, technology companies), public transportation agencies, academic and research institutions and standard developing organizations. In this report CSA has highlighted gaps and needs in regulations and standards. All recommendations have been divided in 8 themes and summarized in the table below:
| Theme | Recommendations by CSA |
|---|---|
| Harmonization and interoperability | Harmonization of standards dedicated to V2X (vehicle-to-everything) communication globally and North America as a priority. In particular, on band allocation. Standardisation of communication in emergency situations and for standardisation of information related to road condition and weather. |
| Uncertainties with enabling communication technologies | Make a clear decision on type of technology to use for the communication: DSRC or C-V2X. Lack of standards in long range wide-area applications |
| Compliance verification | Define responsibilities for certification of CAD technologies. It could be OEM and Tier1 responsible for the certification (or better self-certification) or a third party entity. |
| Physical infrastructure | The question of whether CAD vehicles have to adapt to infrastructure or vice versa was raised, and it was noted that there is a benefit to develop physical infrastructure guidance that can inform infrastructure owners and operators (IOOs) as it relates to line markings, static signs, electronic signs, road works, road continuity. |
| Operation Design Domain | Develop standards for certifying roadways to what level of automation they can support. It is fundamental to define the measurable conditions (temperature, precipitation, etc.), the type of road, the marking signs, the connectivity status that allow or not allow a CAD vehicle to operate. Define standards focusing on adaptive vehicle level of automation for different user needs and conditions. |
| HD mapping and localization | Standards on map creation will help increase compatibility between different providers. |
| Cybersecurity and Protection of privacy | There are already a lot of activities in cybersecurity space. However, there are some concerns related to SCMS (Security Credential Management System), that manage credentials and ensures secure V2X. One is related to misbehaviour detection management and the other on privacy. |
| Technology Maturity | In this area are identified gaps related primarily to edge cases and to difficulty to identify objects and situations under non-optimal conditions, e.g. objects with a low reflectivity, less common objects (like motorcycles), and construction zones. Connectivity is a viable solution in many cases by providing additional information to the vehicle. At the same time, it is assumed that as more demonstrable experience is attained, there will also be a natural enhancement of technical capabilities through improved machine learning. |
ISO Report on standardisation prospective for automated driving (RoSPAV)
In January 2021, the ISO has been published a technical report summarizing the current projects and standards, and the future standard activities. This report offers also a good overview of ISO subcommittee (SC) and ISO working groups (WG) involved in the CAD standards. TC 22 Road vehicles and TC 204 Intelligent transport system are the most active on this field.
In 2017, the ISO/TC 22 Road vehicles created an ad hoc group ADAG (Automated Driving Ad hoc Group) in order to propose a road map for the standardisation of CAD technologies. The scope of this group was to:
- Identify gaps, redundancies, and opportunities
- Promote collaboration between the different WGs belong to TC 22
- Promote discussions between different TCs. In particular with TC 204 Intelligent transport system and ISO/IEC JTC1.
- Explore the feasibility of developing global goals in collaboration with other standardization bodies, such as Society of Automotive Engineers (SAE).
The main results of the ADAG are summarized hereafter.
| Theme | Recommendations by ISO – ADAG |
|---|---|
| Minimal Risk manoeuvre | Standards for defining a minimal risk manoeuvre of electrical vehicle. The design of an electrical vehicle has to consider the battery disposal for performing a minimal risk manoeuvre. |
| Driving monitoring system (DMS) | Standardisation of different levels DMS and feature, which has to take into account the levels of automation, the driver’s role, the use cases, the ODD, the customer personalization. |
| Internal and external HMI | Standardised HMI internal messages for communicating: – The level of automation – The use cases – The ODD – The take-over request Standardised HMI external messages that communicate to road users the intention of connected and autonomous vehicles |
| Perception | Standard methodology assessment of the perception performance |
| Data storage | Standard on the data storage system for automated driving (DSSAS). This is a complementary system to the Event Data Recorder. The DSSAS provides information about take-over request, driving delegation activation, minimal risk manoeuvre performance. |
| Validation | Standardize the methodology and the tools capable of different validation activities to demonstrate the validation completeness. |
| Digital mapping | Harmonise standards related to digital mapping systems |
| Infrastructure | Global standard for horizontal and vertical signs. |
Unfortunately, the ADAG group is no longer active. However, considering the transversal competencies required to design, build and validate connected and autonomous vehicles, the TC 22 decided to continue the coordination activity through a permanent group composed by each representative of the SCs involved. The new group is co-chaired by one representative of the TC22 and one representative of the TC204. This new group is named ACDG (Automated Driving Coordination Group). It is principally involved in this cluster:
- Cluster A “Safety”
- Cluster B “Security”
- Cluster C “HMI”
- Cluster D “AI/ML” Artificial Intelligence and Machine Learning for automated driving
Minimal Risk Manoeuvre
Since the publication of the “Report on standardisation prospective for automated vehicles” in 2021, the topic of vehicle system reactions, particularly in the context of fallback behaviours and minimal risk manoeuvres (MRMs), has seen structured progression within ISO/TC 204 WG 14. The original recommendation to standardize how automated vehicles respond to system failures or risky behaviour—especially for Level 3 and higher automation in mixed traffic environments—has been followed up with concrete standardization work, particularly through the now split ISO 23793 series.
The initially proposed ISO 23793 standard has been divided into two parts to better address the diversity of fallback scenarios. ISO 23793-1: Minimal risk manoeuvre (MRM) for automated driving — Part 1: Framework, straight-stop and in-lane stop defines the foundational structure for fallback behaviour and describes how a vehicle should perform a controlled stop either in-lane or in a straight trajectory when a minimal risk condition must be reached. This part sets the general framework, terminology, classification, and activation conditions for fallback actions, aligning with safety-by-design principles from ISO 21448 (SOTIF) and ISO 26262 (functional safety).
ISO 23793-2: Minimal risk manoeuvre (MRM) for automated driving — Part 2: Road shoulder stop — Minimum requirements and test procedures (under development) goes a step further by specifying the conditions and validation criteria for performing a lateral manoeuvre to the shoulder of the road to reach minimal risk condition. It includes detailed performance requirements and test methods to verify whether an ADS can execute this manoeuvre safely and in compliance with expected behaviour in real traffic. This is particularly relevant in highway scenarios, where a lateral deviation from the travel lane may be the safest and most appropriate response in a fallback situation.
Driving Monitoring System
Since the publication of the Report on standardisation prospective for automated vehicles in 2021, the standardisation of Driver Monitoring Systems (DMS) has made important strides, particularly in response to growing regulatory and industry demand for clear definitions of driver states, transitions of control, and the role of the human operator across different levels of automation. The 2021 report called for a structured approach to DMS standardisation that would align with the SAE levels of driving automation, account for Operational Design Domains (ODDs), adapt to driver roles and system expectations, and support personalisation features for real-world deployment.
The most notable advancement in this field is the publication of ISO/PAS 11585:2023 Road vehicles — Partial driving automation — Technical characteristics of conditional handsfree driving systems, which establishes a basic framework for DMS for lower (L2) automation. This publicly available specification (PAS) provides a common language and baseline requirements to describe, develop, and evaluate DMS functionalities, and serves as a reference point for further standardisation work.
Beyond ISO/PAS 11585, standardisation activities in ISO/TC 22/SC 39 (Ergonomics and driver–vehicle interaction) and SC 33 (Active safety) are supporting the development of more technical test procedures, performance metrics, and evaluation criteria.
HMI
Over the past year, progress in the standardisation of internal and external Human-Machine Interfaces (HMI) for automated driving vehicles has continued steadily. The most recent milestone is the publication of ISO/PAS 23735:2025 Road vehicles — Ergonomic design guidance for external visual communication from automated vehicles to other road users, which provides guidance on external visual communication from automated vehicles to other road users. ISO/TC 22 SC 35 iss developing a study to support external devices in its ISO/CD TR 22276 Road Vehicles — Study on current external light-signalling devices and proposed technologies for future automated vehicles work item. Internal HMI related specification is still missing considering L3 and above automation levels even with some references in ISO/TR 21959-2:2020 Road vehicles — Human performance and state in the context of automated driving — Part 2: Considerations in designing experiments to investigate transition processes.
Perception
Since the original recommendation on improving the assessment of perception performance in automated driving systems, substantial progress has been made in ISO standardisation, reflecting a growing recognition of perception as a core capability for vehicle automation. A new dedicated working group, ISO/TC 22/SC 32/WG 16 – Automotive perception sensors, was established to address this challenge by developing testing methodologies and performance evaluation procedures for various types of perception sensors.
This working group has initiated several targeted work items that aim to provide consistent and repeatable test methods for key sensor modalities used in automated driving. These include:
ISO/CD 13228 Road vehicles — Test method for automotive LiDAR, which defines procedures to assess the performance of LiDAR systems under controlled and variable conditions.
ISO/CD TR 13377 Guidelines for cooperative interference mitigation of automotive millimeter-wave radar, which addresses the growing issue of sensor interference in dense traffic environments where multiple radar-equipped vehicles operate in close proximity.
ISO/AWI 13389 Test method for detection performance of exterior sensing millimeter-wave radar, which sets out test procedures to quantify the detection capabilities of radar sensors, including their limitations under different operational conditions.
In parallel, the need to standardise sensor-to-fusion interfaces has been addressed through work in ISO/TC 22/SC 31, which initially published ISO 23150:2023, a foundational standard describing the logical interface between perception sensors and the central data fusion unit responsible for consolidating sensor outputs into a coherent environmental model. Recognising the complexity and diversity of sensor types and the specific communication needs associated with each, this standard has now been revised and extended into a multipart structure to better reflect sensor-specific requirements and support modular system development.
The expanded ISO 23150 series includes the following drafts:
ISO/DIS 23150-1: General principles for the logical interface across all sensor types.
ISO/DIS 23150-2: Interfaces at the object-level abstraction, allowing perception data to be shared in a harmonised format.
ISO/DIS 23150-11 to -15: Sensor-specific interfaces for radar, lidar, camera, ultrasonic, and microphone systems, each tailored to the unique data structures and operational characteristics of the respective sensor technologies.
ISO/DIS 23150-20: Covering supportive input sources and auxiliary sensor data (e.g. IMUs, GNSS, or vehicle dynamics data) that feed into the perception and fusion process.
Together, these developments mark a major step toward the standardisation of perception system integration and validation in automated driving functions. They provide the technical foundation for interoperability between multi-sensor systems, ensure reproducibility in sensor performance assessment, and facilitate benchmarking of perception capabilities across platforms. The standards also help address industry-wide challenges such as sensor interference, uncertainty quantification, and the need for harmonised perception output for downstream driving decisions.
Overall, the establishment of WG 16 and the multi-part ISO 23150 series reflect a strategic response to the increasing complexity of automated perception, ensuring that automated vehicles can operate reliably across diverse environments, with validated and certifiable sensor performance. Further developments are expected to continue in 2025, extending these efforts to real-world testing, simulation interfaces, and integration into system-level safety and performance frameworks.
DSSAD (Data Storage System for Automated Driving)
The development of data storage systems for automated driving is a critical component of the regulatory and technical ecosystem supporting the safe deployment of highly automated vehicles. These systems are essential for ensuring transparency, accountability, and legal clarity in cases involving automated vehicle operation, particularly during or after critical events such as system failures, incidents, or collisions. Two key frameworks have emerged in recent years: the IEEE 1616.1-2023 standard, and the Data Storage System for Automated Driving (DSSAD) initiative under UNECE WP.29 GRVA.
IEEE 1616.1-2023 – Standard for Data Storage Systems for Automated Driving (link)
Published in 2023 by the Institute of Electrical and Electronics Engineers (IEEE), IEEE 1616.1-2023 defines a comprehensive technical framework and architecture for data storage systems used in vehicles equipped with automated driving functions. It addresses the need for secure, reliable, and structured storage of event data, enabling post-event analysis, incident reconstruction, and system performance assessment.
IEEE 1616.1 complements and extends previous event data recorder (EDR) concepts by aligning with the specific operational and legal needs of SAE Level 3 and 4 systems, where the driver may not be continuously responsible for control. It is intended to support both industry implementation and regulatory compliance across global markets.
DSSAD – Data Storage System for Automated Driving under UNECE WP.29 (link)
In parallel to the IEEE work, the United Nations Economic Commission for Europe (UNECE) WP.29, through its Working Party on Automated/Autonomous and Connected Vehicles (GRVA), has been developing a regulatory framework known as DSSAD since 2019. The DSSAD concept is central to the international type approval of automated vehicles, particularly under the UN Regulation No. 157 for Automated Lane Keeping Systems (ALKS) and other future ADS regulations.
DSSAD is also being coordinated with the Event Data Recorder for Automated Driving (EDR/AD), which is another element of the broader data accountability ecosystem.
Final recommendations
The landscape of standardisation of CAD vehicles is very wide and around 200 standards have been published in different domains so far.
This article attempts to give recommendations based on the investigations performed by other consortium and on expert judgements of professionals working in different fields. Final and harmonised recommendations are provided in the table below. They have been categorized into domains to facilitate future discussions.
Indeed, further collaborations are needed to promote an open discussion between experts on each single domain and representing the interests of different parties (OEM, Tier 1, certification entities, academia, national and international authorities, etc.)
| Domain | Final Recommendations |
|---|---|
| Terms & Definitions | None |
| Management/ Engineering Standards | Standard on inspection requirements for operators managing autonomous vehicle fleet. Standard on requirements of operational management of automated vehicle fleet. |
| AD/ADAS functions | Standardise functional requirements, functional architecture and interfaces between the different components. Standard on requirements of system operations in case of a system malfunction. Standard for the recognition of emergency vehicles belongs to police, fire-fighter, ambulances, etc. Define standards focusing on adaptive vehicle level of automation for different user needs and conditions. Standards for defining a minimal risk manoeuvre of electrical vehicle. Standards for certifying roadways to what level of automation they can support (ODD definition). |
| Testing, Verification & Validation | Standard on requirements for reliability and certifications. Standard methodology assessment of the perception performance. Standardize the methodology and the tools capable of different validation activities to demonstrate the validation completeness. Standard to compare simulation results with real tests. Standard for ontology definition to have an unified meaning of data independent from the underlying IT implementation. Standards that include relevant metrics and key performance indicators for automotive image quality. |
| In-Vehicle Systems, Networks, Data and Interface Definition | None |
| Connectivity | Harmonization of standards dedicated to V2X communication globally. This concerns not only frequency allocations, but also differences in the protocols and even cryptographic algorithms used in different markets, notably the US, Europe, and China. Standardisation of communication in emergency situations and of information related to road condition and weather. Standards in long range wide-area applications. |
| Human Interaction | Standard on requirements between the driver and system at each level of automation and during the control transition. Standardisation of different levels DMS and feature, which has to take into account the levels of automation, the driver’s role, the use cases, the ODD, the customer personalization. Standardised HMI internal messages for communicating: the level of automation, the use cases, the ODD, the take-over request. Standardised HMI external messages that communicate to road users the intention of the connected and autonomous vehicles. |
| Artificial Intelligence | International standard for field testing Liaison activities are needed between JTC1/SC42 and the other technical committee (TC) : – ISO/TC 204 Intelligent Transportation System – ISO/TC 22 Road Vehicle – IEEE P2846 Autonomous Vehicle Decision Making. |
| Safety | Standardised social recognized model to compare the performance of “safe automated driving functions” with respect human driving performance. Standard on ethical requirements on the actions to undertake in case of an emergency situations. |
| Privacy & Security | None |
| Map and positioning | Harmonise standards related to digital mapping systems. |
| Infrastructure | Global standard for horizontal and vertical signs. |
Last update: June 2025
Bibliography
[1] “ISO/TR 20545:2017 Intelligent transport systems — Vehicle/roadway warning and control systems — Report on standardisation for vehicle automated driving systems (RoVAS)/Beyond driver assistance systems”, ISO/TC 204, July 2017. Link
[2] “Standardisation Roadmap for Automated Driving”, Verband der Automobilindustrie (VDA), May 2019. Link
[3] “Connected and Automated Vehicle Technologies – Insights for Codes and Standards in Canada”, CSA Group, June 2020. Link
[4] Thomas Zielke, “Is Artificial Intelligence ready for standardisation?”, Proceedings of 27th European Conference, EuroSPI 2020, Düsseldorf, Germany, September 9–11, 2020. Link
[5] “ISO/IEC TR 24029-1:2021 Artificial Intelligence (AI) — Assessment of the robustness of neural networks — Part 1: Overview”, ISO/IEC JTC1/SC42, March 2021. Link
[6] “ISO Report on standardisation prospective for automated driving (RoSPAV)”, January 2021. Link
[7] “ASAM SIM: Guide – Standardization for Highly Automated Driving”, ASAM. Link
[8] “New Assessment/Test Method for Automated Driving (NATM) Master Document”, UNECE, Validation Method for Automated Driving (VMAD), February 2021. Link.
[9] “IEEEP2020 Automotive Imaging White Paper”, Member of IEEE P2020 Working Group, 2018. Link.
[10] “IEEE 2020-2024 IEEE Standard for Automotive System Image Quality, IEEE, 2025. Link