
Last modified more than a year ago

HEADSTART blog post: V2X communication procedure successfully tested
The HEADSTART project aimed in a first step to develop a testing and validation procedure for Connected and Automated Driving (CAD) functions. In a second step the procedure itself need to be tested and validated to ensure that all necessary tasks and interfaces have been defined and the procedure can be executed from start to end. To do this the HEADSTART partners either using their own recourses or reached out to other projects that are willing to cooperate (so-called linked projects) to validate the whole procedure or certain parts of it.
One of these tests have recently been conducted in Traboch, Austria in a combined effort of Virtual Vehicle (VIF) and 4activeSystems (4A). The aim of the tests was not only to conduct the Proving Ground Testing part of the procedure, but to combine it with the HEADSTART key enabling technology V2X communication. For the tests, the Automated Drive Demonstrator vehicle and a developed V2X communication unit were taken from VIF and brought to the 4A test site. To replicate the scenario in the figure, robotic platforms and targets from 4A were also used.
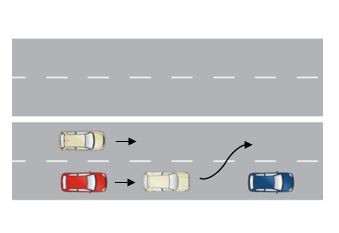
This scenario represents a situation on a two-lane highway. The red vehicle is driving automatically on the right lane. In front of and next to the vehicle, two cars (shown here in white) are driving at the same speed as the automated vehicle. The blue car stands on the right lane due to a defect. The blue car is hidden by the white car, so that it cannot be visually seen by the automated vehicle before the white car changes lanes. However, the standing vehicle sends out information about its location via V2X communication, which the automated vehicle can receive to be able to react in time. Since a lane change is not possible due to the other white car, braking must be initiated, and the vehicle must be brought to a standstill behind the blue car.
The tests showed that the communication between the vehicles worked. The blue vehicle was recognized by the red vehicle by means of this information and it was able to react to the situation. However, in these tests, as well as in the other tests that will be performed in this project, the focus is on the validation of the procedure. Here, the tasks that allow a flawless preparation and execution of proving ground test cases for a small test setup with a few scenarios were validated. The scalability to large test setups was not part of these tests and is covered by other linked projects.
These tests not only successfully tested V2X communication within the HEADSTART procedure, but also recorded valuable data that allow cross validation to the VIF driving simulator and the VIF simulation framework.
Read the full article here.