MEDIATOR behind the scenes: Monitoring the automation state
MEDIATOR is developing a system that mediates between the human driver and the vehicle automation to ensure safe, real-time switching between the two, based on who is fittest to drive. Currently, the prototypes of the four main Mediator system components and their integration are getting shape. Previously, MEDIATOR described the driver state component. Now they briefly introduce the steps towards the automation state component, a joint effort of Zenseact, Veoneer, Cygnify, Chemnitz University of Technology, and Delft University of Technology.
Assessing the automation fitness
The overall aim of the automation state component is the assessment of the automation ‘fitness’ to oversee the driving task. By comparing the fitness of the automation with the fitness of the human driver, the Mediator system decides who is fittest to drive. This assessment not just concerns the situation at a particular moment, but also the expected situation in the near future, as it requires some time to prepare the human driver to take or hand over.
Two main sources of information
What is needed for the fitness assessment are algorithms that estimate the automation performance both – now and in the near future. These algorithms must predict when the automation will be sufficiently fit again to take over (Time to Automation Fitness) or, the other way around, when it will become insufficiently fit and the driving task needs to be handed over to the human driver (Time to Automation Unfitness). Obviously, this prediction is an estimate, resulting in a most likely value and a worst-case and best-case value.
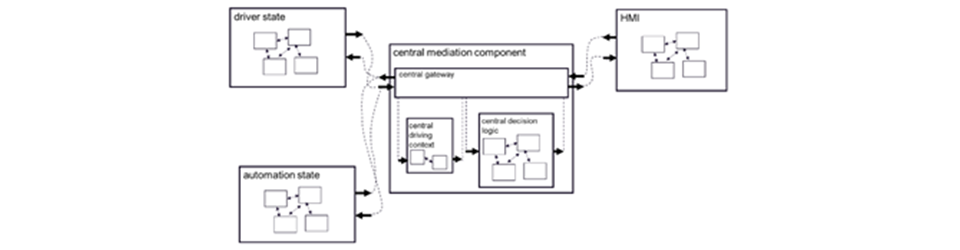
As input for the estimate, two different types of information are combined. One concerns the level of assistance available in the vehicle (i.e., the different automation levels and their Operational Design Domain). The other concerns information about static and dynamic features of the driving context, such as location, road type, driving speed, traffic, and weather. Schematically, this process can be summarised as follows:

Part of the data comes directly from the vehicle’s Driving automation system, e.g., location (GPS), speed, lateral position, and traffic information. An example of traffic information available is illustrated below:

Map matching
An important aspect of assessing and predicting automation fitness is map matching. By connecting the registered GPS location to a digital map, features of the infrastructural driving context can be extracted. These features include, for the current and upcoming infrastructure, road type, number of lanes, speed limit, distance to merging sections and entrance and exit lanes, and whether there is a tunnel, bridge, roundabout or intersection, etc. The map-matched location can also be used to query real-time traffic information from web-based traffic services, e.g., about traffic incidents, road works, and congestion. Often, real-time weather information is also available from these services.
Testing prototypes
The MEDIATOR project presented just some of the elaborations of the vehicle automation state component, based on the general principles set out by Mano et al (D1.3). Work is continuing in an iterative way. Several small-scale tests of preliminary prototypes have already been carried out, which have led to further specifications and improvements. A series of larger-scale test trials are about to start. Results can be expected to lead to further improvements.
Source: https://www.mediatorproject.eu/blog/mediator-behind-the-scenes-monitoring-the-automation-state/